GPS (Global Positioning System) ou NAVSTAR (Navigation System by Timing And Ranging) est à l'origine un système militaire américain, conçu dans les années 70 et contrôlé par le Département de la Défense (DoD). Il a succédé au système TRANSIT/NNSS, opérationnel en 1964.
GPS est un système spatial de radio-positionnement et de transfert de temps. Il fournit, à un nombre illimité d’utilisateurs à travers le monde, dans un système global et unique, quelles que soient les conditions météorologiques, une information de position, de vitesse et de temps.
L’exploitation civile du système GPS doit être considéré du point de vue de ses trois composantes essentielles : les segments spatial, de contrôle et les utilisateurs (Figure 1). Cet aperçu global du système a pour objet de cerner au mieux ses capacités et d’en comprendre ses limites intrinsèques.
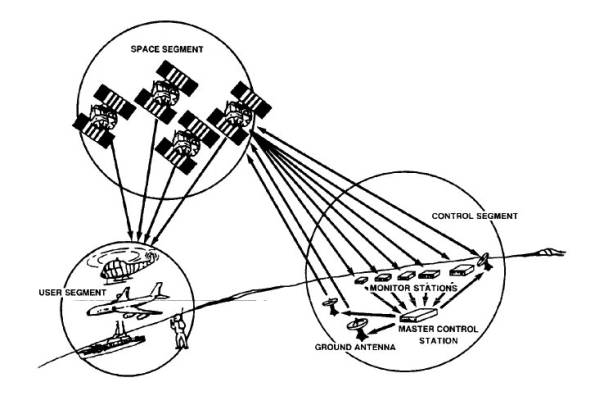
Figure 1. Les trois composantes de GPS
Il inclut tous les éléments orbitaux du dispositif de positionnement : les plates-formes, le signal GPS et le message de navigation. Ces éléments vont nous permettre d’envisager les modes d’exploitation.
L’utilisation quasi-permanente de GPS est possible depuis février 1994, période à laquelle la constellation de 21 satellites (+3 en réserve) a été déclarée opérationnelle. Ces satellites sont en orbite quasi-polaires, à 20200 km d’altitude. Ils sont répartis sur six plans orbitaux, décalés de 60 degrés (Figure 2).
|
|
|


Figure 2. La constellation et les satellites GPS
La période de révolution des satellites est de 12 heures sidérales (soit 11 heures et 58 minutes). Par conséquent, on retrouve les mêmes satellites, dans les mêmes positions, deux fois par jour (détail apparemment futile, mais souvent très utile dans la planification des missions de terrain !).
Le signal GPS est émis par les satellites de la constellation en direction de la surface de la Terre. Il se compose actuellement de deux fréquences porteuses : L1 à 1575.42 MHz, et L2 à 1227.60 MHz, dont la stabilité est assurée par des horloges atomiques. Elles correspondent à des longueurs d’onde de 19 cm pour L1, et 24 cm pour L2. Elles sont générées à partir d’une fréquence f0, dite fondamentale, à 10.23 MHz.

Figure 3. Codes de modulation du signal GPS et leurs longueurs d’onde
Ces fréquences sont modulées par des codes pseudo-aléatoires :
· Le code C/A (Coarse/Acquisition ou Clear/Access) modulant L1. Il est accessible à tous les utilisateurs.
· Le code P (Precise) modulant L1 et L2, n’est accessible qu’aux utilisateurs habilités.
· Et enfin, le message de navigation, à 50 Hz, que nous présentons au paragraphe suivant.
4.1.1.3. Le message de navigation
Le message de navigation contient des informations fondamentales pour l’exploitation du système GPS. En l’occurrence, il contient :
· Le temps GPS, défini par le numéro de semaine et le temps dans la semaine. L’origine du temps GPS se situe au 6 janvier 1980 à 0h00, l’origine de la semaine le dimanche à 0h00.
· Les éphémérides, comprenant les paramètres utiles au calcul de la position du satellite émetteur à une dizaine de mètres près.
· Les almanachs, contiennent les mêmes informations que les éphémérides, à une précision moindre, et concernent l’ensemble de la constellation.
· Les coefficients d’un modèle mondial de correction ionosphérique.
· Des informations sur l’état de la constellation.
· Le modèle de comportement des horloges et les paramètres de transformation du temps GPS vers le temps UTC.
Constitué de cinq stations au sol, le segment de contrôle a pour mission :
· L’enregistrement des signaux et la prédiction des éphémérides.
· L’observation du comportement des oscillateurs, le calcul des paramètres de synchronisation et de dérive d’horloge.
· La collecte d’informations météorologiques.
· L’envoi aux satellites d’informations nécessaires à la composition du message de navigation.
Grâce à ces interventions, conjointement à celles de stations de mesure réparties sur l’ensemble du globe, l’IGS (International GPS Service for Geodynamcics) donne accès à des éphémérides dites précises permettant des calculs d’orbitographie très fins (cf. §4.1.3.2).
Ce troisième et dernier segment est bien évidemment celui qui nous intéresse le plus. A l’heure actuelle, les utilisateurs du système GPS constituent une population très diversifiée, tant dans ses objectifs que dans ses moyens. Nous nous intéresserons d’abord aux types de récepteur (assez représentatif du public concerné et de ses besoins), pour nous pencher ensuite sur les méthodes de mesure de position absolues ou relatives.
4.1.3.1. Les types de récepteur
Plusieurs types de récepteurs GPS existent dans diverses gammes d’application, de prix, de précision et de difficulté de mise en œuvre. Nous en dressons ici un bref aperçu, découpé en deux catégories : les appareils grand public, que l’on peut trouver dans les magasins de sports et loisirs, et les appareils professionnels.
La catégorie des appareils grand public travaille en mono-fréquence (L1), par mesure de pseudo-distance. Actuellement, une grande majorité dispose d’une entrée/sortie au format NMEA qui leur permet soit d’exporter leurs données vers un outil externe (PC avec module d’intégration GPS par exemple), soit de recevoir des corrections différentielles d’une station fixe émettrice (mode DGPS, souvent utilisé en navigation maritime pour laquelle beaucoup de phares et de signaux sont équipés d’une antenne GPS et d’un canal d’émission radio) :
· Récepteur de navigation simple (de 150€ à 300€).
· Récepteur de navigation avec outils cartographiques (à partir de 300€).
Quant aux appareils professionnels, ils peuvent travailler sur les deux fréquences, en mesurant les pseudos-distances et la phase :
· Récepteur géodésique mono-fréquence (jusqu’à 15k€)
· Récepteur géodésique bi-fréquence (à partir de 15k€)
4.1.3.2. Les services liés à GPS
Dans le cadre de travaux de grande envergure, il est possible d’exploiter plusieurs sources de données accessibles via Internet. C’est notamment le cas des éphémérides précises du Service International de GPS pour la Géodynamique (IGS). Ces données sont généralement disponibles avec un délai de dix jours, et permettent de réaliser de véritables exploits tant sur la détermination des orbites que sur celle de points levés. Elles sont obtenues grâce aux mesures réalisées en continu par des centaines de stations de réception et sont généralement fournies dans le système ITRF (International Terrestrial Reference Frame). La France participe activement à ce service grâce au Réseau Géodésique Permanent (RGP), en cours de densification.
Le second service concernant GPS est le centre de navigation des garde-côtes (U.S. Coast Guard Navigation Centre). Ce service permet d’obtenir de multiples informations sur la constellation : état des satellites, pannes récentes, description des fichiers d’orbites…
4.2. Les méthodes de positionnement
Au paragraphe précédent, nous évoquions deux familles de récepteurs : les premiers dits de navigation, et les seconds dits géodésiques. Ils se distinguent par leur prix d’acquisition d’une part, mais aussi, et surtout, par leurs méthodologies de mise en œuvre. Avant toute chose, il est nécessaire de présenter le principe de la mesure GPS et les différentes sources d’erreurs qui lui sont liées.
4.2.1. Principe de la mesure GPS
La mesure géodésique par GPS peut être scindée en deux composantes : la mesure de pseudo-distances par observation du code, et la mesure de phase. Chacune d’elle dispose de ses avantages, de ses limites et doit être rattachée au matériel, à la précision souhaitée et au mode opératoire.

Figure 4. Mesure de pseudo-distance
La mesure de pseudo-distance par observation du code est basée sur une analyse de corrélation entre le signal émis par un satellite et la réplique générée par le récepteur. Ainsi, le décalage temporel observé entre ces deux signaux nous donne le temps mis par l’onde pour parcourir la distance entre son point d’émission et son point de réception. La position du récepteur est alors calculée par intersection de sphères, d’où la nécessité de disposer d’au moins quatre satellites en visibilité.
Un tel calcul nécessite des outils extrêmement précis : stabilité de la réplique du code généré par le récepteur, résolution de la mesure de temps (quelques dixièmes de nano secondes pour les meilleurs !)…
4.2.1.2. Observation de la phase
De fortes imprécisions entachent la qualité du positionnement par mesure de code. Plutôt que de mesurer un temps de parcours de l’onde électromagnétique, on va s’intéresser à la détermination du déphasage entre le signal reçu et sa réplique généré par le récepteur, la phase de battement. Se basant sur l’effet Doppler, on détermine alors la variation de la distance entre satellite et récepteur. L’essentiel du problème est alors de déterminer le nombre de cycles nécessaire au parcours de cette distance. Cette inconnue, couramment appelée l’ambiguïté entière, est difficilement accessible, et on utilise des méthodes de différentiation (simple, double, triple), selon la configuration des observations. Elles ont cependant pour avantage de réduire l’influence des erreurs citées au paragraphe 4.2.1.4.
4.2.1.3. Les facteurs de qualité
Le principe du positionnement par GPS nous montre que des contraintes existent en terme de distribution de la constellation. En effet, une mauvaise répartition des satellites engendrera une faible précision de positionnement. Pour qualifier cette géométrie, on dispose généralement d’indicateurs notés DOP (Dilution Of Precision) et qui donnent, à un instant donné, une appréciation de l’affaiblissement de la précision pour :
· Un positionnement planimétrique : HDOP (Horizontal DOP)
· Un positionnement altimétrique : VDOP (Vertical DOP)
· Une détermination du temps : TDOP (Time DOP)
· Un positionnement 3D (avec un minimum de trois satellites) : PDOP (Position DOP)
Enfin, on retient souvent un dernier facteur appelé GDOP (Geometric DOP) qui intègre le PDOP et le TDOP. Il n’est le plus souvent accessible que sur des récepteurs géodésiques et nécessite la visibilité de quatre satellites au minimum.
|
|
|
|
|
Mauvais GDOP |
Bon GDOP |
Mauvais GDOP dus aux obstacles |



Figure 5. Le GDOP, pratiquement
Généralement, pour un positionnement par pseudo-distance et si plus de quatre satellites sont visibles (ce qui est le plus souvent le cas en milieu naturel, mais peut parfois s’avérer difficile en zone urbaine), les paramètres du DOP servent à choisir les quatre satellites les mieux placés, de façon à proposer les meilleurs résultats.
4.2.1.4. De multiples sources d’erreurs
Les erreurs sur la mesure GPS résultent d’une combinaison complexe de trois composantes :
· le bruit : combinaison du code PRN et du bruit intrinsèque au récepteur. Ces deux composantes sont chacune évaluées à environ 1m.
·
les biais :
· l’accès sélectif (SA) : jusqu’au 2 mai dernier, cette dégradation volontaire engendrait une erreur de positionnement d’environ 100m. Les méthodes différentielles étaient alors les seules à donner le moyen de le minimiser.
· la dérive d’horloge d’un satellite : jusqu’à 1m.
· la précision des données des éphémérides diffusées : 1m.
· le délai troposphérique : 1m. Sa modélisation nécessite la prospection de cette couche basse de l’atmosphère, grâce à des mesures de température, pression et humidité dans différentes conditions météorologiques.
· le délai ionosphérique non modélisé : 10m. Les coefficients de correction transmis dans le message de navigation ne peuvent permettre l’élimination que d’environ la moitié du retard.
· le multi-trajet : du aux réflexions multiples, sur les surfaces proches du récepteur, qui interfèrent avec le signal direct. Cette composante est difficile à détecter et à éviter.
·
les
fautes :
· du segment de contrôle, humaine ou informatique, peuvent provoquer des erreurs du mètre à la centaine de kilomètres.
· de l’utilisateur. Une erreur sur la sélection du datum peut se chiffrer du mètre à la centaine de mètres.
· la défaillance du récepteur, tant au niveau matériel que logiciel.
4.2.2. Type de positionnement basé sur les pseudo-distances
Nous abordons ici les méthodes de positionnement basé sur l’observation de pseudo-distances, c’est-à-dire la mesure du code C/A. C’est la mesure qu’il est généralement possible de faire couramment avec les récepteurs de navigation. Nous ferons référence ici à l’étude interne au SERTIT (Service Régional de Traitement de l’Image et de Télédétection) menée au cours de l’été 2000 sur la qualification des capacités d’un récepteur GPS de navigation, suite à la levée du SA.
4.2.2.1. Positionnement autonome
Cette méthode consiste à obtenir la position du récepteur, en absolu, par intersection des sphères (Figure 4) d’émission de chaque satellite. Cette méthode permet d’obtenir une erreur moyenne de positionnement d’une dizaine de mètres à la volée. Le graphe suivant (Figure 6) présente l’histogramme de la distribution des écarts entre les mesures instantanées et la valeur géodésique (donnée par la fiche signalétique du point observé). La précision décamétrique annoncée est validée par 99,5% des mesures.

Figure 6. Positionnement GPS à la volée, précision planimétrique
Il peut cependant être nécessaire d’obtenir des résultats plus fins et l’étude menée par le SERTIT a montré que le calcul d’une position moyenne, sur environ 10 minutes, était un bon moyen de réduire l’erreur sur la position absolue. Deux éléments ont été considérés : tout d’abord, le comportement temporel de la moyenne instantanée des mesures, puis la validité de cette valeur moyenne par rapport aux coordonnées connues. Pour le premier point, nous avons constaté qu’une période d’observation de vingt minutes environ garantissait une convergence absolue de la moyenne instantanée à moins de 1 mètre de sa valeur finale (Figure 8).
De manière générale, sur l’ensemble des points test observés, on constate que les mesures se répartissent aléatoirement dans un cercle d’un rayon moyen d’environ huit mètres (Figure 7). Par conséquent, on peut ainsi mesurer pleinement le gain du calcul de la moyenne, minimisant le caractère aléatoire de la mesure isolée.

Figure 7. Répartition géographique des mesures instantanées

Figure 8.Comportement temporel de la moyenne instantanée
Pour conclure, la précision du positionnement autonome est étroitement liée à la précision des éphémérides radiodiffusées. De multiples corrections sont envisageables pour améliorer le résultat, mais la qualité du récepteur utilisé (niveau de bruit sur les mesures) et la présence de multi-trajets sur le site seront les facteurs limitant.
4.2.2.2. Positionnement différentiel
Les méthodes de positionnement différentiel peuvent s’appliquer avec tous les types de matériel (navigation ou géodésique) et se déclinent en deux grandes familles : le post-traitement et le temps réel. La première méthode est la plus simple et la moins coûteuse ; la seconde est plus complexe et nécessite un système de communication pour transmettre les données.
Dans ce type de positionnement, on considère que les principales erreurs du GPS (orbitales, atmosphériques et dérive d’horloge) sont du même ordre de grandeur dans la région avoisinant la station de contrôle (ou pivot). Ce pivot enregistre les mesures et calcule en continu la position des satellites en visibilité. Il détermine alors les corrections différentielles qui sont envoyées, ou appliquées, à tous les récepteurs situés dans son secteur. C’est la méthode dite des corrections aux positions. Elle présente néanmoins une contrainte majeure : les mêmes satellites doivent être observés par les deux stations. Un problème de masque peut faire échouer cette méthode, qui est de ce fait, le plus souvent utilisée dans le domaine maritime. En positionnement différentiel, la méthode d’application de corrections aux observations est préférable à celle des corrections appliquées aux positions.
 Quelle
que soit la méthode de correction, qu’elle soit appliquée en temps réel ou en
post-traitement, il demeure que plus le récepteur mobile est éloigné du
pivot plus les erreurs aux deux emplacements diffèrent. Le positionnement
différentiel devient alors de plus en plus inexact. On distingue alors trois
classes de ligne de base :
Quelle
que soit la méthode de correction, qu’elle soit appliquée en temps réel ou en
post-traitement, il demeure que plus le récepteur mobile est éloigné du
pivot plus les erreurs aux deux emplacements diffèrent. Le positionnement
différentiel devient alors de plus en plus inexact. On distingue alors trois
classes de ligne de base :
· les bases très courtes (inférieures à 5 km). Dans ce cas, on peut utiliser indifféremment un récepteur mono fréquence (2 ppm) ou bi-fréquence (1 ppm), ces seuls critères de précision étant noyés dans le bilan d’erreur global. Pratiquement, la différence se verra au temps d’initialisation du récepteur. Pour la mesure en mono fréquence, 5 min sont nécessaires à l’initialisation et 10 min pour une détermination centimétrique. En bi-fréquence, l’initialisation prend environ 30 s et calcule un point en 6 min.
· les bases moyennes (de 5 à 20 km). Sur le territoire métropolitain, il est assez rare d’avoir à réaliser des bases de cet ordre de grandeur, sauf dans le cas de chantier de rattachement très spécifique. Là encore, le temps d’initialisation va jouer le rôle déterminant. Sur une base de 5 à 10 km, un mono fréquence aura besoin de 30 à 60 min alors qu’un bi-fréquence n’en demandera que 7 à 15. Et si la valeur de base est poussée entre 10 et 20 km, on passe à des durées de 1 à 2 h, et 15 à 30 min, respectivement.
· les bases longues (au-delà de 20 km). Il est alors très difficile de fixer raisonnablement les ambiguïtés entières. Les temps d’observations et les volumes de calcul deviennent dans ces cas extrêmement lourds.
4.2.3. Type de positionnement basé sur la phase
Les mesures de phase ne sont généralement (du moins en topographie) pas effectuées seules et sont accompagnées des mesures de codes. Elles peuvent être réalisées en deux modes : statique et dynamique.
Le GPS statique consiste à observer l’information de phase en deux points (au moins) pendant une longue durée (de une à plusieurs heures selon le type d’application). Les remarques énoncées au paragraphe précédent restent bien évidemment valables. L’intérêt des temps d’observation longs est de pouvoir tirer parti des évolutions de la géométrie de la constellation, contribuant ainsi à une meilleure résolution des ambiguïtés entières et à une amélioration de la solution.
Le mode dynamique se décline en plusieurs méthodologies d’observations, dont la facilité de mise en œuvre est fortement conditionnée par le matériel employé d’une part, et d’autre part, par la finalité des mesures.
· Cinématique. Lorsqu’il est basé sur la mesure de phase, le mode cinématique nécessite l’entière détermination des ambiguïtés pour obtenir des précisions décimétriques. Anciennement, il était nécessaire d’initialiser le mobile sur une position fixe mais à présent, des algorithmes de calcul "on the fly" sont couramment intégrés dans les contrôleurs. On l’applique généralement pour établir une relation entre des éléments physiques et des données recueillies à bord d’un véhicule en mouvement (avion pour des prises de vues aériennes).
· Semi-cinématique, de l’anglais Stop-and-Go. Cette méthode consiste à stationner sur chacun des points à mesurer pendant une dizaine de secondes. Avant le départ du mobile, les ambiguïtés entières doivent être déterminées et le mobile doit maintenir un verrouillage sur quatre satellites au moins. Si le verrouillage est perdu, l’opérateur doit alors retourner au dernier point correctement mesuré et relancer l’initialisation. Cette méthode est donc très rapide et efficace mais nécessite de travailler dans des zones bien dégagées.
· Pseudo-cinématique. Similaire aux deux méthodes précédentes, elle consiste à stationner chaque point deux fois, pendant quelques minutes, à une heure d’intervalle au moins. On combine alors les avantages de deux géométries de la constellation et les temps de mesure cumulés. Cependant, d’un point de vue pratique et logistique, cette méthode est assez peu souvent employée.
· Statique rapide. Cette technique se fonde sur la résolution des ambiguïtés sur de très courtes périodes d’observation. On s’appuie alors sur des renseignements additionnels (observation du code P, ou satellites redondants). Ces levés doivent être réalisés sur des lignes de base courtes pour obtenir une précision centimétrique. Très proche de l’acquisition semi-cinématique, cette technique présente l’avantage de ne pas nécessiter un verrouillage sur quatre satellites pendant le déplacement entre les points.

Tableau 1. Récapitulatif des méthodes GPS
4.3. Planification et préparation
La liste des méthodes d’observation des signaux GPS montre bien qu’il faut impérativement mettre en adéquation le type de récepteur employé, la méthodologie de mesure avec les objectifs de la mission de terrain. Il est de plus conseillé de procéder à des reconnaissances du terrain avant les campagnes de mesures. Ainsi, la conception de la campagne est améliorée, son efficacité augmentée. L’intérêt est avant tout d’éviter les mauvaises surprises et de repérer les points les plus difficiles pour proposer une planification adéquate.
4.3.1. Choix de la méthode de levé

Figure 9. Techniques de positionnement et précisions associées (en mètres)
On notera que la figure ci-dessus indique la technique à utiliser pour atteindre une exactitude donnée et non de la plage d'exactitudes que permet d’obtenir une technique. Autrement dit, si la gamme de précision recherchée se situe dans les limites d’une technique (par exemple, métrique), il s’agira d’établir un ordre de priorité entre cette précision finale souhaitée du levé, les moyens matériels et humains disponibles, le temps nécessaire à la mise en œuvre d’une méthode.
L’à-propos de l’utilisation d’un levé GPS semi-cinématique, statique rapide ou statique classique pour un projet exigeant un niveau de précision entre le décimètre et le mètre dépend de la nature de l’emplacement et de l’espacement des points. Les levés semi-cinématiques posent le plus grand nombre de contraintes puisqu’ils exigent que les trajets suivis lors des déplacements d’un point à un autre soient libres de tout obstacle. Un levé semi-cinématique serait donc tout indiqué dans le cas où un grand nombre de points doivent être positionnés dans une zone dégagée comme un grand champ par exemple. Les levés statiques rapides doivent, en règle générale, être limités à de courts vecteurs, si une exactitude centimétrique est désirée. Pour des levés semi-cinématiques et statiques rapides, les chances de succès sont bien supérieures si au moins six satellites sont observés. Pour obtenir une grande exactitude sur de plus longues distances ou lorsque la géométrie des satellites est mauvaise, il peut être plus sage de recourir aux techniques GPS statiques classiques.
De plus, on notera que la figure précédente illustre les techniques à utiliser en fonction de l’exactitude planimétrique plutôt de l’exactitude altimétrique. Les exactitudes altimétriques correspondantes dépendent de la nature de la grandeur : hauteur au-dessus de l’ellipsoïde ou altitude orthométriques. Leur relation est illustrée au paragraphe 3.2.3.
Le coût du positionnement GPS est étroitement lié à la technique utilisée, qui dépend elle-même principalement du niveau d’exactitude exigé. Les deux principales variables qui influencent les coûts pour une même technique sont le temps d’observation nécessaire à chaque emplacement et le coût des récepteurs nécessaires. En règle générale, plus la période d’observation nécessaire à chaque point est brève, moins le levé sera coûteux.
Les récepteurs GPS peuvent être loués ou achetés. Quel que soit le cas, il est recommandé de n’utiliser que des récepteurs d’une même marque pour le positionnement relatif, si on souhaite éviter des problèmes comme des erreurs systématiques, des complications dans le traitement des données et des incompatibilités dans la synchronisation de l’enregistrement des observations résultant souvent de l’utilisation de plusieurs types de récepteurs différents.
Le récepteur utilisé doit permettre de recueillir les observations qu’exige la technique de positionnement retenue. En positionnement autonome, comme en positionnement différentiel basé sur les observations de pseudo distances, un récepteur n’effectuant que des observations à partir du code suffit (remarquer que certains récepteurs n’utilisent les observations de phase que pour lisser les observations issues du code et améliorer l’exactitude résultante).

Pour les levés GPS semi-cinématiques, statiques rapides et statiques
classiques, il faut utiliser les pseudo distances et les observations de phase.
Pour de courts vecteurs levés par des techniques classiques, des récepteurs
mono fréquence suffisent. En GPS statique classique et pour de longs vecteurs,
lorsqu’une grande précision est recherchée, il est souhaitable d'utiliser des
récepteurs bi-fréquences qui permettent de corriger la plupart des erreurs
ionosphériques. Pour des levés statiques rapides, il est fortement recommandé
d’utiliser des récepteurs bi-fréquences puisqu’ils permettent d’appliquer des
méthodes évoluées de traitement des données pour résoudre les ambiguïtés et
offrent ainsi de bien meilleures chances de succès.
Tableau 2. Type d’observations nécessaires pour les
différentes
techniques de positionnement
Le choix d’un récepteur peut se révéler un processus complexe en raison du grand nombre de types de récepteurs GPS maintenant disponibles, de la gamme étendue de possibilités offertes et des nombreuses applications auxquelles ils sont destinés. Un grand nombre d’éléments dont il faut tenir compte sont énumérés à la figure suivante et devraient faciliter le choix d’un récepteur. Cette liste n’est pas exhaustive et ne vise qu’à faciliter un choix éclairé. Pour chacun des aspects mentionnés les priorités varieront naturellement en fonction de l’application à laquelle le levé est destiné.

Figure 10. Facteurs à prendre en compte pour le choix d’un récepteur
On se référera utilement aux publications spécialisées pour obtenir des comparatifs, en termes de prix et de performances, des matériels sur le marché (GPS World, GIS World, XYZ, http://www.geocomm.com …)
4.3.3. Validation des matériels et procédures
La phase de planification d’un projet GPS devrait comporter des essais des procédures et de l’équipement qui seront utilisés, depuis la collecte des données jusqu’au résultat final, afin de s’assurer qu’ils permettent de satisfaire de manière fiable aux exigences en matière d’exactitude. Toutefois, si un utilisateur a déjà utilisé avec succès les mêmes procédures et le même équipement GPS pour une application semblable, il peut ne pas être nécessaire d’effectuer une nouvelle validation.
Trois composantes principales sont éprouvées dans le cadre du processus de validation : la technique de positionnement adoptée, l’équipement à utiliser et la méthode de traitement retenue. La méthode de positionnement adoptée peut être l’une des techniques décrites précédemment ou encore une procédure plus récente. Quel que soit le cas, on devra vérifier si la méthode permet de répondre de manière fiable aux besoins de l’utilisateur. L’équipement GPS varie grandement en complexité, en coût et en possibilités. On ne peut présumer que les niveaux d'exactitude avancés par les fabricants ou par tout autre utilisateur seront obtenus de façon constante dans toutes les conditions d’exploitation sur le terrain. Il importe donc de soumettre l’équipement à des essais et de l’évaluer. Pour les mêmes raisons, il importe de mettre à l’essai et d’évaluer le logiciel et les méthodes de traitement.
Le processus de validation offre également l’avantage de permettre aux utilisateurs de détecter et de résoudre les problèmes avant d'entreprendre de coûteux levés, de rationaliser les opérations et de vérifier les exactitudes auxquelles on peut s’attendre avec les procédures mises à l’épreuve.
4.3.4. La reconnaissance de terrain
La reconnaissance consiste à vérifier sur place les lieux d'un projet avant d’entreprendre des observations GPS. Il est nécessaire de vérifier si les emplacements conviennent au GPS, l’existence de points géodésiques et les exigences logistiques. Sont énumérées dans le tableau suivant les composantes clés de la reconnaissance d'un terrain.
Vérifier si les emplacements conviennent au GPS |
Absence d’obstacles Absence de sources d’interférences |
|
Vérifier l’existence de points
géodésiques |
Matérialisations des points Stabilité des points |
|
Formuler les besoins logistiques |
Mode de transport Temps d’accès, de déplacements Equipements spéciaux |
|
Mesures à adopter |
Choix d’autres emplacements Etablissement de stations excentrées Etablissement de descriptions Levés de masques |
Tableau 3. Reconnaissance de terrain
La reconnaissance sur le terrain a pour résultat final l’obtention d’un ensemble de points prêts pour les observations GPS ainsi que d’une description à jour de chacun des emplacements, de l’information concernant l’accès à ces emplacements et d’une description des différentes mesures particulières à adopter à chaque endroit.
4.4. Rattachement de chantiers GPS
Quel que soit le mode d’observation des points GPS et le matériel employé, il est souvent utile de rattacher le levé à un système de coordonnées. Le problème du rattachement de la campagne de mesure se pose de façon d’autant plus cruciale que la précision du résultat final souhaité est élevée.
4.4.1. Le changement de système géodésique
Déjà évoqué dans le premier chapitre, le changement de système géodésique regroupe toutes les étapes de calcul nécessaires à l’expression des coordonnées d’un point d’un système vers un autre. Le moyen le plus simple reste d’utiliser les outils logiciels à disposition de tout utilisateur ayant accès à Internet. Cette recommandation est valable exclusivement pour les mesures réalisées avec un récepteur de navigation, non converties directement par le récepteur. Pour les mesures réalisées avec des récepteurs géodésiques, la transformation est prise en charge soit pendant la mesure (temps réel), soit au post-traitement.

Figure 11. Interface du logiciel Circé 2000, © IGN
 Une
recommandation particulière est à prendre en compte concernant les changements
de systèmes à la volée, en particulier pour les récepteurs de navigation. Les
paramètres utilisés sont généralement ceux d’une transformation de Molodensky
(da, df, dx, dy, dz), et sont souvent fournies à des précisions métriques. La
non-maîtrise du calcul de la transformation par le récepteur pousse à
recommander l’enregistrement des déterminations des latitudes et longitudes des
points dans le système WGS 84. La transformation peut alors être réalisée au
bureau, avec des outils plus éprouvés (Figure
11).
Une
recommandation particulière est à prendre en compte concernant les changements
de systèmes à la volée, en particulier pour les récepteurs de navigation. Les
paramètres utilisés sont généralement ceux d’une transformation de Molodensky
(da, df, dx, dy, dz), et sont souvent fournies à des précisions métriques. La
non-maîtrise du calcul de la transformation par le récepteur pousse à
recommander l’enregistrement des déterminations des latitudes et longitudes des
points dans le système WGS 84. La transformation peut alors être réalisée au
bureau, avec des outils plus éprouvés (Figure
11).
4.4.2. Considérations pratiques
L’essentiel du travail de rattachement d’un levé GPS doit être réalisé sur le terrain. Ce rattachement peut être effectué dans un système soit global, soit local. Dans tous les cas, un minimum d’observations est à recueillir. Le procédé le plus souvent employé est la colocation de points.
Le principe de rattachement de chantier par observation de points en colocation est relativement simple : il suffit de disposer de quelques points connus dans la zone de travail. Ces points connus, soit en WGS 84 soit dans le système local, permettent de calculer un ajustement des observations sur le réseau de points GPS. Au minimum, un point doit être connu, et de cette façon, on peut calculer les valeurs des trois translations permettant de passer des coordonnées GPS aux coordonnées utilisateur. Il est bien évidemment souhaitable d’observer plusieurs points connus. Ainsi, l’ajustement calculé prendra en compte à la fois les translations, les rotations et les facteurs d’échelles sur chaque axe (également appelé transformation d’Helmert). Différents types de ces transformations sont couramment implémentées dans bon nombre de logiciels commerciaux ou gratuits (téléchargeables en ligne).